



Передача движения металлорежущих станков
Приводы
В основе всего многообразия металлорежущих станков при всем различии их внешних форм, назначения и технических характеристик лежат простые кинематические элементы, которые в различном сочетании образуют разные кинематические цепи. В ряде случаев разные станки имеют на отдельных участках одинаковые частные кинематические цепи и в разных станках повторяются общие механизмы.
Все это делает нецелесообразным отдельное изучение каждого вида станков как самостоятельного, не связанного с общей системой и не подчиненного общим нормам и законам механики. Это, наоборот, обязывает объединить все, что является общим для металлорежущих станков разных типов, разных конструкций и разного назначения. Концентрированное рассмотрение общих вопросов, являющихся принципиальной основой механики металлорежущих станков, облегчает понимание единой сущности работы всех станков и частных особенностей каждого из них.
Работу каждой части станка предопределяют его кинематической схемой и местом, которое занимает в ней эта часть, а настраивают станок на выполнение определенной работы путем решения уравнений кинематических цепей. Для графического изображения кинематических цепей и составляющих их элементов приняты установленные стандартами обязательные обозначения.
Источником движения в металлорежущих станках служит электрический двигатель, привод от которого осуществляется несколькими способами. Приводом называется устройство или система устройств для передачи движения от его источника к той или другой части станка. В кинематической цепи ведущими элементами называются те, которые передают движение, и ведомыми те, которые получают движение. Ведущие элементы на рисунках обозначены нечетными числами, ведомые — четными.
Исторически наиболее старым является трансмиссионный привод, в котором электрический двигатель пришел на смену водяному колесу и паровой машине. На новых заводах такой привод не делают, а на старых заменяют.
Индивидуальный привод бывает в двух вариантах: с контрприводом и без него. Первый вариант применяют на станках со ступенчатым шкивом. Движение передается ремнем от шкива электрического двигателя ведомому шкиву, сидящему неподвижно на валу контрпривода, и далее через ступенчатый шкив вторым ремнем к станку. Более распространенный, второй вариант применяют на станках с коробкой скоростей (рис. 274, а). В этом варианте только один ремень, который передает движение от шкива двигателя ведомому шкиву станка, сидящему на его первом валу.
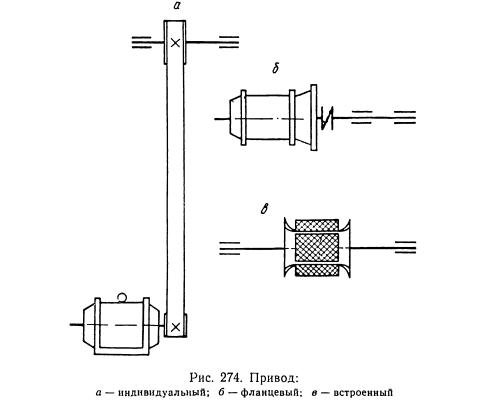
Фланцевый электрический двигатель крепится своим фланцем к коробке скоростей (рис. 274, б). Вал двигателя лежит на одной оси с первым валом станка, на котором неподвижно сидит ведущее зубчатое колесо. В этом приводе ременной передачи нет.
Электрический двигатель встроен в станок и является его составной частью (рис. 274, в). Вал двигателя одновременно является первым валом станка. На нем неподвижно сидит ведущее зубчатое колесо, а ременной передачи нет.
Передача вращательного движения
Имеется несколько способов передачи вращательного движения.
В ременной передаче вращение ведущего шкива передается плоским или клиновыми ремнями ведомому шкиву (рис. 275, а и б). Достоинством этой передачи является ее плавность, а недостатком — скольжение ремня и небольшая величина передаваемых крутящих моментов. Передаточным отношением ременной передачи является выражение

где iр — передаточное отношение ременной передачи;
dвщ — диаметр ведущего шкива, мм;
dвм — диаметр ведомого шкива, мм.
В цепной передаче вращение ведущей звездочки передается ведомой посредством цепи (рис. 275, в). Преимуществом ее перед ременной передачей является отсутствие скольжения ремня. Передаточное отношение зависит от числа зубьев на звездочках

где iц — передаточное отношение цепной передачи;
Zвщ — число зубьев ведущей зведочки;
Zвм — число зубьев ведомой звездочки.
В цилиндрической и конической зубчатых передачах вращение одного зубчатого колеса непосредственно передается другому (рис. 275, г, д, е). Зубчатая передача отличается большой компактностью и малыми габаритами и допускает передачу больших крутящих моментов. Передаточное отношение определяется числом зубьев

где iZ — передаточное отношение зубчатой передачи;
Zвщ — число зубьев ведущего зубчатого колеса;
Zвм — число зубьев ведомого зубчатого колеса.
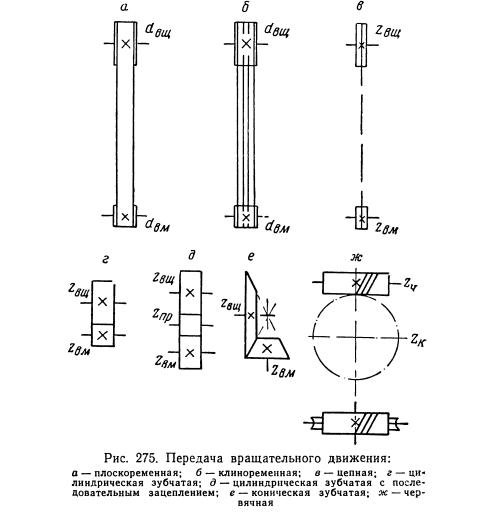
Если несколько зубчатых колес находятся в последовательном зацеплении, то передаточное отношение подсчитывают по числу зубьев только первого и последнего колес, т. е. ведущего и ведомого (рис. 275, д). Промежуточные зубчатые колеса на величину передаточного отношения не влияют:

где Zпp — число зубьев промежуточного зубчатого колеса.
В червячной передаче (рис. 275, ж) вращение червяка передается червячному колесу. Передача очень компактна и дает возможность получать малые передаточные отношения. Ho коэффициент полезного действия ее ниже коэффициента полезного действия зубчатых передач. Передаточное отношение зависит от числа ходов червяка и числа зубьев червячного колеса;

где iч — передаточное отношение червячной передачи;
Zч — число ходов червяка;
Zк — число зубьев червячного колеса.
В длинных кинематических цепях, состоящих из нескольких или многих передач, общее передаточное отношение всей кинематической цепи получают перемножением передаточных отношений отдельных кинематических пар:

где i — общее передаточное отношение всей кинематической цепи.
Для упрощения подсчета можно не вычислять отдельные передаточные отношения, а подставить их развернутые значения в уравнение общего передаточного отношения. Тогда в числителе будут величины, характеризующие ведущие элементы, а в знаменателе ведомые, например

При известном числе оборотов ведущего вала и найденном передаточном отношении можно определить число оборотов ведомого вала:

где nвм — число оборотов ведомого вала, об/мин;
nвщ — число оборотов ведущего вала, об/мин;
у — коэффициент, учитывающий скольжение ремня;
np — количество ременных передач.
Превращение вращательного движения в прямолинейное
Движение, получаемое от его источника, вращательное, а некоторые части металлорежущих станков должны иметь прямолинейное движение. Превращение вращательного движения в прямолинейное производится несколькими способами.
Реечная передача состоит из зубчатого колеса и рейки (рис. 276, а). Линейное перемещение рейки за один оборот зубчатого колеса составляет

где l — перемещение рейки, мм/об;
t — шаг рейки, мм;
Z — число зубьев реечного зубчатого колеса.
Так как

где m — модуль реечного зубчатого колеса, мм, то

Вместо зубчатого колеса в реечной передаче может быть и червяк (рис. 276, б). Тогда линейное перемещение рейки за один оборот червяка составляет

Zч — число ходов червяка;

Винтовая передача состоит из винта и гайки с четырьмя вариантами движений: винт выполняет вращательное движение, а гайка прямолинейное, или винт выполняет и вращательное и прямолинейное движения, гайка неподвижна, или гайка выполняет вращательное, а винт прямолинейное движение, или гайка выполняет и вращательное, и прямолинейное движения, а винт неподвижен (рис. 276, в). Следовательно, и винт, и гайка могут быть как ведущим элементом, так и ведомым или одновременно и ведущим и ведомым при неподвижном другом элементе. Во всех случаях линейное перемещение ведомого элемента составляет за один оборот ведущего

где l — линейное перемещение винта или гайки, мм; t — шаг винта гайки, мм;
Zв — число ходов винта гайки.
Превращение вращательного движения в прямолинейное возвратнопоступательное
В ряде случаев движение в металлорежущих станках должно быть не только прямолинейным, но и возвратно-поступательным. Для этого применяют следующие механизмы.
Кривошипный механизм выполняет за один оборот кривошипного диска один двойной ход, т. е. прямой и обратный ходы ползуна, соединенного шатуном с кривошипом (рис. 277, а).


За это время скорость прямолинейного движения ползуна два раза увеличивается от нуля до наибольшей величины и два раза уменьшается от наибольшей величины до нуля. Линейное перемещение ползуна между его крайними положениями составляет

где l — длина хода ползуна, мм;
r — радиус кривошипа, мм.
Таким образом, величину линейного перемещения ползуна регулируют перестановкой пальца кривошипа, изменяющей радиус кривошипа.
Кулисный механизм состоит из кривошипного диска и качающейся кулисы, свободный конец которой соединен с ползуном (рис. 277, б). Кулиса имеет продольное окно, по которому может передвигаться кулисный камень. Палец кривошипа входит в отверстие кулисного камня. Вращаясь вместе с кривошипным диском, палец кривошипа перемещает кулису из одного крайнего положения в другое и обратно. Кулисный камень при этом передвигается в окне кулисы по сделанным в нем направляющим. За одним оборот кривошипного диска ползун, соединенный с качающимся концом кулисы, делает один двойной ход, состоящий из прямого и обратного ходов. Длина прямого и обратного ходов равна, но соответствующие им углы поворота кривошипного диска имеют различную величину. Следовательно, прямой и обратный ходы имеют разную скорость, непрерывно меняющуюся от нуля до наибольшей величины и от наибольшей величины до нуля. Больший угол поворота соответствует прямому рабочему ходу, выполняемому с меньшей линейной скоростью, а меньший угол обратному ходу, который производится с большей скоростью. Так как

где l — длина хода ползуна, мм;
R — длина кулисы, мм;
r — радиус кривошипа, мм;
h — расстояние между осью кривошипного диска и осью качания кулисы, мм,
то

Из этого следует, что длина хода ползуна зависит от радиуса кривошипа и регулируется перестановкой его пальца.
Кулачковый механизм состоит из цилиндрического кулачка и управляемого им пальца, соединенного с ползуном, или из дискового кулачка и скользящего по нему ролика, тоже связанного с ползуном (рис. 277, в и г). На цилиндрической поверхности цилиндрического кулачка или на торце дискового кулачка вырезают ручей определенного профиля, по которому скользит палец или катится ролик, передающие движение ползуну. Ручей может быть ограничен не двумя поверхностями, управляющими движением пальца или ролика, а только одной. Роль другой поверхности выполняет пружина, постоянно прижимающая палец или ролик к единственной профильной поверхности кулачка. Это значительно упрощает кулачковый механизм и очень облегчает изготовление самого кулачка. За один оборот кулачка ползун делает один двойной ход. Скорость прямого и обратного ходов и скорость на отдельных участках движения ползуна определяется профилем кулачка. Чем круче изменяется профилирующая кривая, тем резче меняется скорость прямолинейного движения ползуна. Длина хода ползуна равняется расстоянию между крайними тачками профильной кривой, измеренному параллельно оси цилиндрического кулачка, или разности наибольшего и наименьшего радиусов дискового кулачка.
Гидравлическое устройство превращает вращательное движение, получаемое масляным насосом, в прямолинейное возвратно-поступательное движение ползуна следующим образом (рис. 277, д). Лопастный, поршневой или шестеренчатый масляный насос нагнетает масло из резервуара через кольцевую выточку цилиндрического золотника по открытой им трубе в полость цилиндра. Под давлением масла поршень перемещается, а вместе с ним перемещаются поршневой шток и ползун. Масло, оставшееся в рабочем цилиндре, с противоположной стороны поршня вытесняется им по трубе в свободную полость золотникового цилиндра и далее по отводящей трубе в масляный резервуар. Для ограничения хода ползуна на нем устанавливают два передвижных упора. В результате движения ползуна упор наклоняет рычаг и шарнирно связанный с ним золотниковый шток передвигает золотник. В новом положении кольцевая выточка золотника оказывается против другой трубы, и масло из насоса направляется теперь в нее, поступает в полость рабочего цилиндра с другой стороны поршня и перемещает его с поршневым штоком и ползуном в противоположную сторону. Оставшееся с другой стороны поршня масло вытесняется им по трубе в свободную полость золотникового цилиндра и потом в резервуар.
Шестеренчатый насос подает постоянное количество масла. В случае такого насоса для регулирования скорости движения ползуна на подающей трубе устанавливают дроссельный кран. Нужное для получения желаемой скорости количество масла пропускается в рабочий цилиндр, а избыток его возвращается в резервуар. Длина рабочего хода ползуна равняется расстоянию между передвижными упорами и регулируется их перестановкой.
Периодическое движение
Некоторые движения в металлорежущих станках должны выполняться периодически. Это при непрерывном движении ведущего элемента достигается периодичностью движения ведомого элемента.
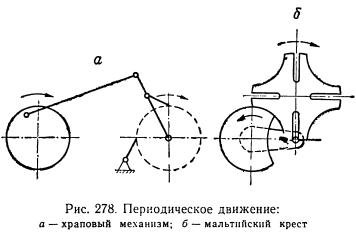
Наиболее употребительным является храповой механизм (рис. 278, а). Палец кривошипа соединен посредством шатуна с коромыслом и сообщает ему качательное движение. Осью качания коромысла служит ось храпового колеса с односторонне направленными зубьями. На коромысле помещается собачка. При наклоне коромысла она упирается в очередной зуб и поворачивает храповое колесо. При обратном наклоне коромысла она проскальзывает по зубьям храпового колеса, оставляя его в состоянии покоя. Ho во избежание обратного поворота храпового колеса, вторая, неподвижная собачка, проскальзывая по его зубьям во время поворота, вводится силой пружины в очередную впадину и, упираясь в следующий за нею зуб, предотвращает возможный поворот храпового колеса в обратную сторону и, таким образом, служит запорным устройством.
Передаточное отношение храпового механизма зависит от числа зубьев, захватываемых собачкой при одном качании коромысла и при одном обороте кривошипного диска, и от общего числа зубьев храпового колеса и всегда является числом меньшим единицы.

где ixp — передаточное отношение храпового механизма;
Zc — число зубьев, захватываемых собачкой за одно качание коромысла;
Zxp — число зубьев храпового колеса.
Регулирование захватываемого собачкой числа зубьев осуществляется одним из трех способов: изменением радиуса кривошипа, изменением длины качающегося коромысла и поворотом защитного козырька. В последнем случае остается открытым только нужное число зубьев храпового колеса, и собачка при рабочем качании коромысла сначала скользит по наружной поверхности козырька и только в нужном месте попадает во впадину между зубьями.
Реже встречается механизм мальтийского креста (рис. 278,б). Он состоит из вращающегося водила с пальцем на конце и мальтийского креста с радиальными пазами в количестве от трех до восьми. При вращении водила его палец входит в очередной паз мальтийского креста и поворачивает его до тех пор, пока сам не выйдет из паза. Остальную часть окружности палец описывает, не производя никакой работы, но, подойдя снова к мальтийскому кресту, попадает во второй радиальный паз, который при повороте пришел на место первого. Чтобы мальтийский крест не повернулся во время остановки, механизм снабжают запорным устройством в виде неполного диска, вращающегося вместе с водилом. Запорный диск входит во время остановки в дуговой вырез мальтийского креста между радиальными пазами и препятствует его повороту. Вырез на запорном диске со стороны водила делают для того, чтобы не мешать повороту мальтийского креста водилом. Передаточное отношение механизма мальтийского креста зависят только от числа радиальных пазов.

где iкp — передаточное отношение механизма мальтийского креста;
Z — число радиальных пазов мальтийского креста.
Число оборотов ведомого элемента в механизмах периодического движения находят обычным путем
