



Исследование устойчивости САР с регулятором БРМ-1, определение параметров автоколебаний
Учитывая существенную нелинейность характеристик элементов схемы, анализ устойчивости САР и определение параметров автоколебании, проводим на основе метода фазового пространства и его приложений к системам с запаздыванием, разработанного А.А. Андроновым. Применение метода фазового пространства для анализа рассматриваемой схемы позволяет рассмотреть возможные движения системы при различных начальных условиях, определить параметры устойчивых автоколебаний и условия их возникновения.
Из рассмотрения структурной схемы и уравнений отдельных элементов весь цикл работы системы при отклонении регулируемого параметра можно представить следующим образом:
- включение сервомеханизма с некоторым запаздыванием по отношению к началу отклонения регулируемой переменной;
- изменение регулируемой величины до приведения ее к значению, при котором отключается исполнительный механизм;
- импульс на отключение сервомеханизма и непосредственное отключение его с некоторым запаздыванием по отношению к началу подачи отключающего импульса;
- торможение серводвигателя;
- возобновление цикла работы схемы при противоположном направлении включения привода в случае перерегулирования.
Уравнения фазовых траекторий, характеризующих режим разгона и торможения при различных направлениях включения серовопривода, определены на основе совместного решения уравнений (VI.I—VI.II). После простейших подстановок получаем уравнения фазовых траекторий на плоскостях Ф0, Ф1 и Ф2:

Это уравнение парабол, определяющих движение изображающей точки в области, ограниченной линией переключения. Уравнения (VI.12) характеризуют движение привода и ограничены значениями:

где фm1 — максимальное значение скорости изменения регулируемого параметра при одном направлении включения исполнительного механизма;
Фmа — аналогичное значение скорости при другом направлении включения исполнительного механизма.
Аналогично, путем совместного решения уравнений (VI.1—VI. 11) определены уравнения линий переключения 2,2', 3 и 3'.

Здесь 2Aт — зона нечувствительности регулятора.
Уравнения (VI.12—VI.16) в координатах ф и ф определяют значение регулируемой величины, при котором подастся импульс на переключение сервопривода.
Для анализа примененного метода коррекции и определения его эффективности проведем сравнительное исследование двух систем:
1) без корректирующего контура (система регулирования 1—2—3—4—5 —6—7—8—9—1);
2) при наличии корректирующего контура (система регулирования, в зависимости от знака сигнала а: 1—2—3—4—5—6—7—8—9—1 или 1—2-3—4—6'—7—8—9—1).
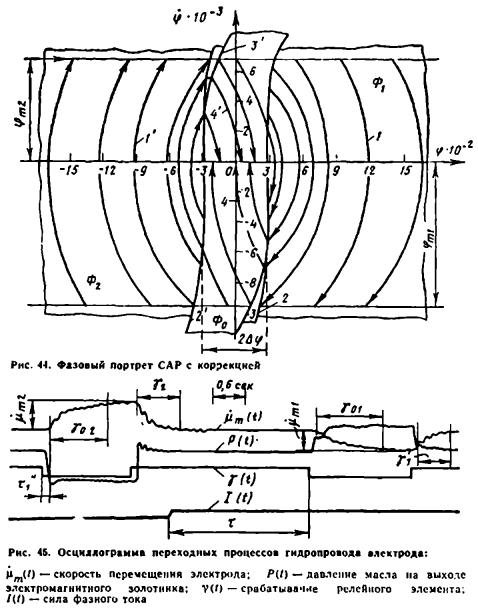
Анализ каждой из систем проводим па основе рассмотрения соответствующих фазовых траектории. Уравнения фазовых траекторий и линий переключения по схеме с коррекцией не отличаются от приведенных выше уравнений. Фазовые портреты для систем без коррекции и с коррекцией изображены на рис. 43, 44.

Фазовые траектории построены для значений параметров, полученных в результате обработки осциллограммы переходных процессов гидропривода электрода (рис. 45). Полученный фазовый портрет позволяет определить возможные движения CAP при принятых допущениях и получить критические значения параметров, при которых проходит смена движений системы. У анализируемой системы могут быть четыре вида возможных движений:
1. Сходящийся апериодический процесс:

2. Сходящийся малоколебательный процесс:

3. Автоколебания, если

4. Расходящиеся колебания, если одновременно:

Существование того или иного вида движения определяется приведенными уравнениями. Наиболее желательным переходным процессом является апериодически затухающее изменение регулируемого параметра. Необходимым и достаточным условием является выполнение неравенства (VI.17), которое может быть преобразовано:

При постоянных параметрах регулятора вид переходного процесса зависит от значений коэффициента усиления объекта, который, в свою очередь, определяется характером технологического процесса. Поэтому, как следует из уравнений (VI.17) и (VI.22), система, устойчивая при данном технологическом режиме, может стать неустойчивой при резком нарушении этого режима.
Условие устойчивости и отсутствия автоколебаний для системы с коррекцией записывают аналогично уравнению (VI.17):

На основе уравнений (IV.17) и (VI.23) и с учетом соотношения т1<т приходим к выводу, что при неизменных параметрах объекта и регулятора схема с коррекцией позволяет ослабить ограничения, накладываемые на величину нечувствительности и характеристики отдельных элементов. В частности, при тех же динамических свойствах схему с коррекцией можно применять для объекта, у которого передаточный коэффициент выше, чем в случае исходной системы.
На основании соотношения (VI.22), определяющего возможное увеличение передаточного коэффициента, получим

где Kу1 и Kу — максимально допустимые передаточные коэффициенты в системе с коррекцией и без нее.
По формуле (VI.22) получены следующие граничные значения передаточного коэффициента для рассматриваемой CAP (при заданной зоне нечувствительности 2Аф=0,05): дли системы без коррекции Ky<0,61 и для системы с коррекцией Ку<2,57.
Таким образом, введение корректирующей цепи позволяет примерно в четыре раза расширить пределы изменения коэффициента передачи объекта для получения тех же динамических свойств САР. При необходимости получения требуемого качества регулирования при большем значении коэффициента передачи объекта необходимо уменьшить собственное время задержки элементов CAP т1. С другой стороны, при одном и том же коэффициенте усиления объекта введение корректирующей цепи позволяет уменьшить зону нечувствительности регулятора.